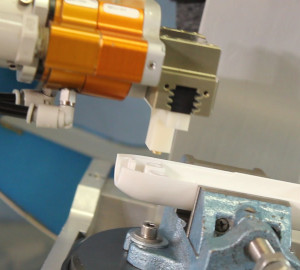
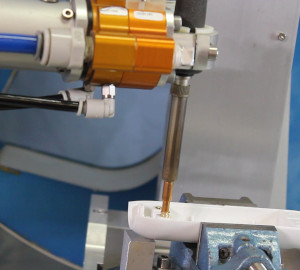
The Touch Robot’s built-in compliance, force control, and contact sensing allow performance of assembly tasks where the tolerance of fit can be tighter than the tolerance of location. When installing heat-set inserts, the Touch Robot applies steady pressure with the heating element, letting the softening material determine the assembly motion time and speed. Accurate displacement measurements tell the robot when the insert is at the proper depth.