The Touch Robot can remove pin blips or other surface positives from airfoil surfaces without altering the surface contour or reducing wall thickness.
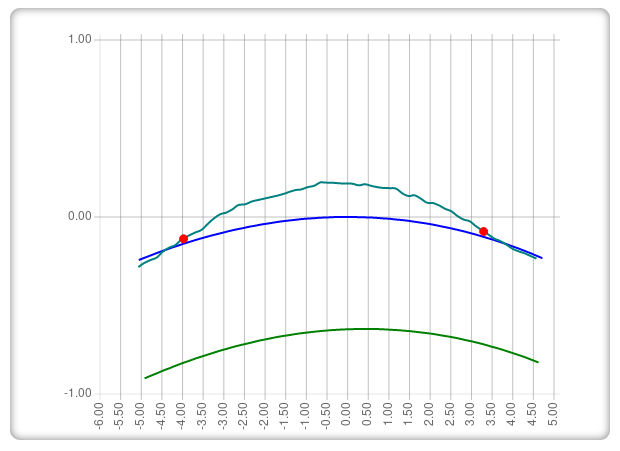
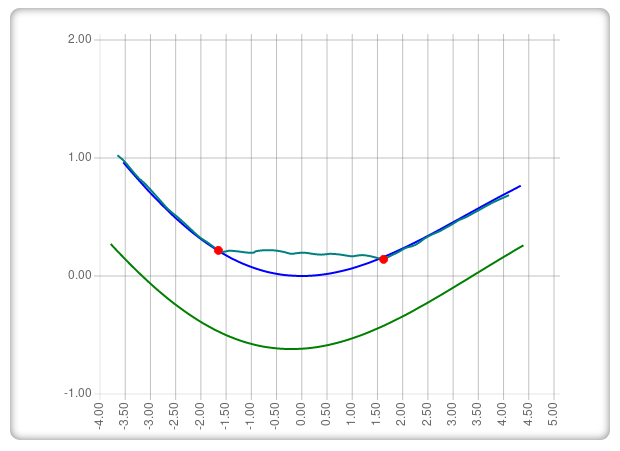
Using a belt grinder with a coarse belt, the surface positive is taken down to approximately 0.13 mm (.005″). Then, using a fine belt and with the grinder turned off, the robot traces across the surface. This tells the robot, in the frame of reference of its grinder, precisely the surface location. The desired surface contour taken from the CAD model is matched to this trace to reveal the location and size of the remaining positive. The robot then generates motion paths that are focused on the positive, where it works until the desired surface contour is achieved.