Natural Dynamics
The Touch Robot responds to gentle pushes without the need for costly and fragile force sensors. Here, the robot’s motor torques are commanded to only compensate for gravity and friction.
What makes the Touch Robot different?
It was built to work like a person- using force and touch to achieve consistent results despite variability in the work. Manufacturing robots today are powerful and can replicate motions consistently, but have trouble with parts that vary. Unplanned contact (aka “crash”) can generate dangerous forces, so part shape, placement, and tooling must be precise and repeatable. The Touch Robot’s gentle touch and control of contact force and compliance allows part geometry to determine the tool path and reduces the need for precision and repeatability.
How does it do this?
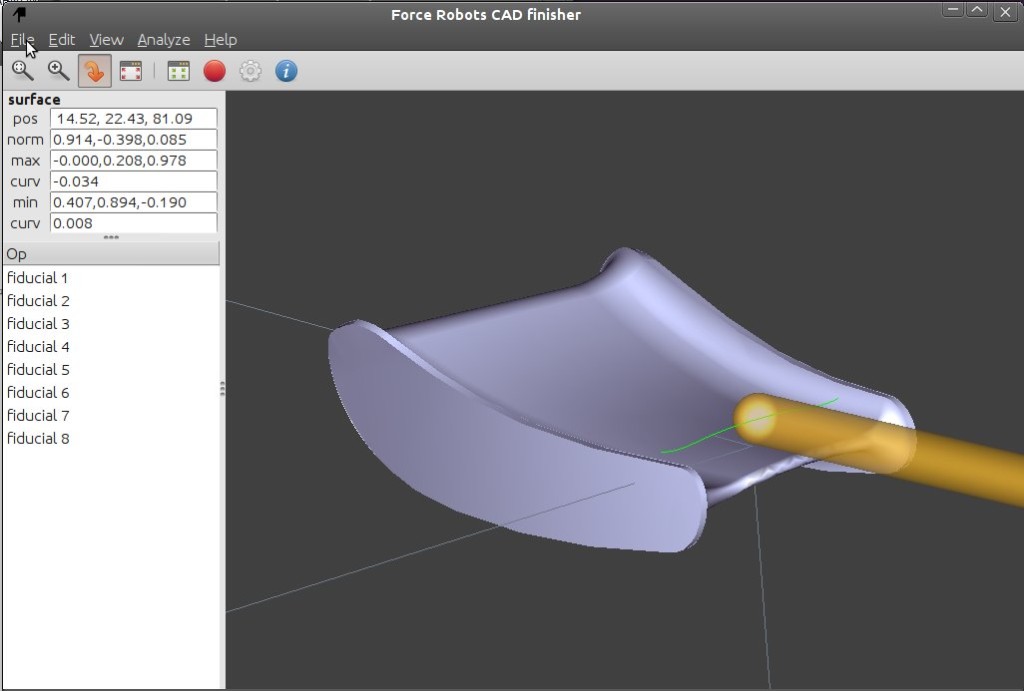 The Touch Robot succeeds by combining the precision of a machine with the dynamics of the human arm. With its light-weight structure, low friction joints, and perfectly smooth actuation, arm tension and force can be precisely controlled to maintain desired contact pressure, regardless of variation in workpiece location. While it works, it compares measured geometry with a CAD reference. It then autonomously generates tool paths and forces to match the measured geometry to the desired. This unique, closed-loop operation produces consistent, quality results even with variation in work requirements and material removal tool performance. Through self-acquired measurements using the cutting tool as the probe, the precision of machining will be much better than the uncertainty and variation of the initial part geometry!
The Touch Robot succeeds by combining the precision of a machine with the dynamics of the human arm. With its light-weight structure, low friction joints, and perfectly smooth actuation, arm tension and force can be precisely controlled to maintain desired contact pressure, regardless of variation in workpiece location. While it works, it compares measured geometry with a CAD reference. It then autonomously generates tool paths and forces to match the measured geometry to the desired. This unique, closed-loop operation produces consistent, quality results even with variation in work requirements and material removal tool performance. Through self-acquired measurements using the cutting tool as the probe, the precision of machining will be much better than the uncertainty and variation of the initial part geometry!
Why can’t this be done with a force sensor?
Controlling force with a sensor depends on the spring rate in a robot’s joints. Arm position is adjusted so that the “springs” in the joints produce the desired end-effector force. The robot’s dynamics can’t be changed, however. Workpiece contact, particularly with a heavy arm, produces impulse forces destabilize force control loops. In addition, vibrations from end-of-arm power tools produce vibrations that also are destabilizing. With enough low enough loop gains stability can be assured, but the robot may have to move too slowly to be practical. See the precision and responsiveness of the Touch Robot’s sensor-free force control below.
Force Precision